免示教焊接機器人H型鋼自動生成刀路
 免示教焊接機器人包角焊與連續焊
免示教焊接機器人包角焊與連續焊
 尋位過程,測量拐角位置
尋位過程,測量拐角位置
免示教焊接機器人腰圓連續焊接

免示教焊接機器人小擺幅電弧跟蹤
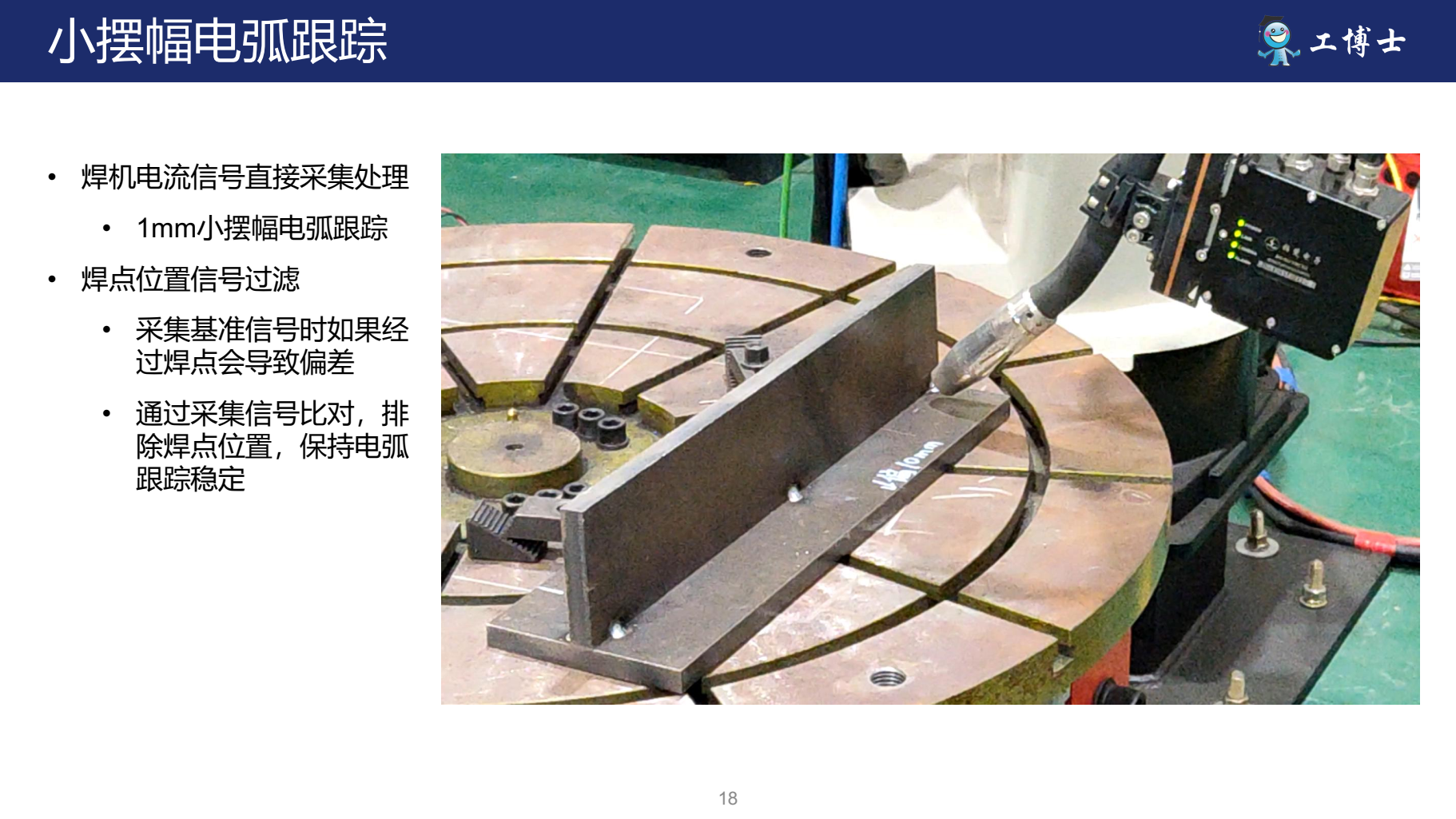
小擺幅電弧跟蹤
1. 焊機電流信號直接采集處理:1mm小擺幅電弧跟蹤
2. 焊點位置信號過濾:
a. 采集基準信號時如果經過焊點會導致偏差;
b. 通過采集信號比對,排除焊點位置,保持電弧跟蹤穩定
免示教焊接機器人箱型柱坡口自適應

箱型柱坡口自適應:
原本:
1. 人工坡口質量差,坡口角度不均勻
2. 拼裝中變形導致間隙不均勻
3. 焊點,電渣焊孔等位置需要調整焊槍位置和工藝
免示教版本:自適應全熔透焊接(加背墊)
掃描坡口(1次)
層道規劃
成型剖面


 在線客服
在線客服
 企業微信
企業微信







 [VIP第1年] 指數:1
[VIP第1年] 指數:1 通過認證
通過認證 









